
In der Welt der Messtechnik und Überwachung gewinnen Werkzeuge, die Unsichtbares sichtbar machen, zunehmend an Bedeutung. Akustische Kameras sind ein faszinierendes Beispiel dafür. Sie ermöglichen es uns, Geräusche zu lokalisieren und zu charakterisieren, indem sie Schallwellen quasi in ein Bild übersetzen. Stellen Sie sich vor, Sie könnten auf einen Blick sehen, woher ein störendes Geräusch kommt, sei es ein Leck in einer Druckluftleitung, ein Problem an einer Maschine oder übermäßiger Verkehrslärm. Genau das leisten akustische Kameras.

Diese hochentwickelten Geräte bestehen im Wesentlichen aus drei Hauptkomponenten: einem Mikrofon-Array, einer Schalldatenverarbeitungseinheit und einem Display. Das Herzstück ist das Mikrofon-Array, eine Anordnung von Dutzenden oder sogar Hunderten von Mikrofonen, die speziell positioniert sind, um Schall aus verschiedenen Richtungen und zu unterschiedlichen Zeiten zu erfassen. Durch die präzise Analyse der winzigen Zeit- und Intensitätsunterschiede, mit denen der Schall die einzelnen Mikrofone erreicht, kann die Kamera die genaue Position der Schallquelle berechnen.
Grundlagen der Schallortung
Das Prinzip hinter der Schallortung mit einem Mikrofon-Array basiert auf der Tatsache, dass Schallwellen Zeit benötigen, um sich auszubreiten. Wenn eine Schallquelle existiert, erreichen die von ihr ausgehenden Wellen die verschiedenen Mikrofone des Arrays zu leicht unterschiedlichen Zeitpunkten und mit unterschiedlicher Intensität, abhängig von der Entfernung und dem Winkel zur Schallquelle. Die Verarbeitung dieser Informationen ermöglicht die Lokalisierung.
Schlüsseltechnologien zur Schallortung
Mehrere Algorithmen und Techniken werden eingesetzt, um die von den Mikrofonen gesammelten Daten in nutzbare Informationen umzuwandeln:
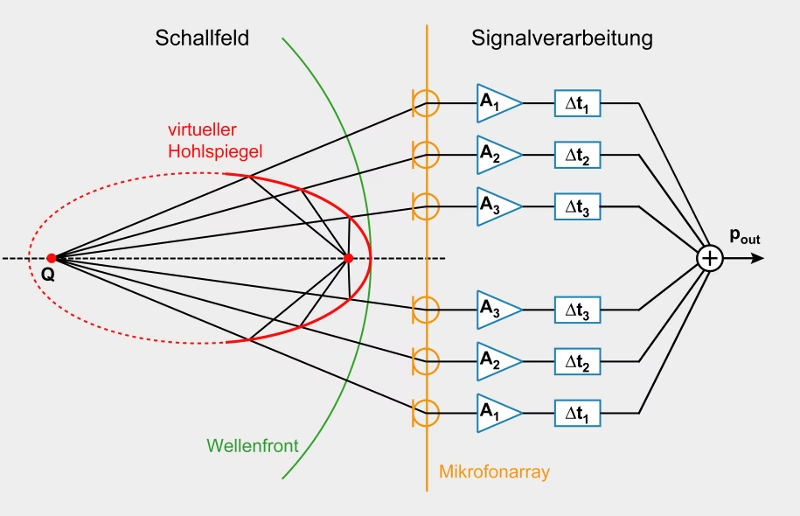
- Strahlformung (Beamforming): Dies ist eine gängige Methode zur Schallortung. Sie funktioniert, indem die Signale der einzelnen Mikrofone mit spezifischen Zeitverzögerungen summiert werden. Diese Verzögerungen werden so gewählt, dass das Signal aus einer bestimmten Richtung verstärkt wird, während Schall aus anderen Richtungen minimiert oder ausgelöscht wird. Das Array wird quasi virtuell auf eine bestimmte Richtung ausgerichtet, um die Schallintensität von dort zu messen. Das Ergebnis wird oft als Schallintensitätskarte oder „Power Map“ dargestellt.
- Zeitdifferenz der Ankunft (TDOA) und Ankunftswinkel (AoA): Diese Techniken messen die Unterschiede in der Ankunftszeit des Schalls an verschiedenen Mikrofonen oder den Winkel, aus dem der Schall kommt. Sie können oft kombiniert werden, beispielsweise mithilfe eines verallgemeinerten Kreuzkorrelationsalgorithmus (GCC). GCC ist relativ einfach zu implementieren und rechentechnisch weniger aufwendig. Allerdings erfordert eine hohe Genauigkeit mit GCC in der Regel eine große Anzahl von Mikrofonen. Komplexere Algorithmen können die Anzahl der benötigten Mikrofone reduzieren, erfordern aber leistungsfähigere und teurere Prozessoren.
- Schallintensitätsmessung: Über die reine Lokalisierung hinaus können akustische Kameras auch die Schallintensität in Dezibel (dB) quantifizieren. Einige Modelle integrieren zusätzliche Sensoren oder verwenden spezielle Algorithmen, um genaue Intensitätsmessungen durchzuführen.
- Akustische Holographie: Diese Technik wird verwendet, um die räumliche Ausbreitung von Schallwellen zu bestimmen oder Schallquellen im Nahfeld zu identifizieren. Sie basiert auf räumlichen Fourier-Transformationen und verwendet Arrays von Druck- und/oder Partikelgeschwindigkeitssensoren, um die Schallfelder nahe der Quelle abzuschätzen.
- Künstliche Intelligenz (KI): Fortschrittliche akustische Kameras integrieren zunehmend KI in ihre Verarbeitungssoftware. KI-basierte Algorithmen können die Leistung verbessern, die Erkennung bestimmter Geräuschmuster ermöglichen (z. B. spezifische Maschinenfehler oder Motorengeräusche) und gleichzeitig die Kosten durch optimierte Hardwareanforderungen senken.
Aufbau von Mikrofon-Arrays
Die Struktur des Mikrofon-Arrays hat einen erheblichen Einfluss auf die Leistungsfähigkeit und den Anwendungsbereich der akustischen Kamera. Es gibt verschiedene Anordnungen für 2D- und 3D-Messungen.
2D-Akustikmessungen
Bei 2D-Akustikmessungen werden ebene Oberflächen oder Szenarien erfasst, bei denen die Schallquellen im Wesentlichen in einer Ebene liegen. Die Mikrofone sind dabei in einer flachen Struktur angeordnet und zeigen alle in dieselbe Richtung. Gängige Strukturen sind:
- Ring-Arrays: Gut geeignet für Beamforming, sowohl im Nah- als auch im Fernfeld einsetzbar, innen und außen.
- Stern-Arrays: Ebenfalls gut für Beamforming, werden meist für Fernfeldmessungen verwendet.
- Fibonacci-Arrays: Basierend auf einer Fibonacci-Spirale. Sie eignen sich sowohl für Holographie als auch für Beamforming und können mit demselben Array Nah- und Fernfeld messen. Sie bieten oft einen breiteren Dynamikbereich.
- Paddle-Arrays (rechteckig): Gut geeignet für Nahfeldmessungen bei niedrigen Frequenzen.
Obwohl 2D-Arrays vielseitig sind, haben sie Einschränkungen, insbesondere bei der Messung unebener oder dreidimensionaler Oberflächen. Die Approximation einer 3D-Oberfläche als Ebene kann zu Messfehlern führen, insbesondere bei der Berechnung der Schallintensität, da Entfernungsunterschiede nicht korrekt berücksichtigt werden. Bei großen Abständen sind diese Fehler oft gering, in kleinen Räumen können sie jedoch signifikant sein.
Einige 2D-Arrays verwenden ein doppelschichtiges Kanalsystem, um Nah- und Fernfeldmessungen mittels Intensitätskartierung zu ermöglichen. Mit entsprechender Software können gleichzeitig Schalldruck und Partikelgeschwindigkeit/Schallintensität kartiert werden. Es gibt handgeführte 2D-Arrays für die Fehlersuche vor Ort und stationäre Arrays für präzisere Labor- oder technische Messungen.
3D-Akustikmessungen
3D-Akustikkameras wurden entwickelt, um die Einschränkungen von 2D-Arrays bei komplexen Oberflächen und Räumen zu überwinden. Sie berücksichtigen Oberflächenunebenheiten und korrigieren Entfernungsfehler, indem sie ein 3D-Modell der zu analysierenden Oberfläche oder des Raumes verwenden. Tritt Schall von einer Quelle auf, die nicht im Modell enthalten ist, kann dies jedoch zu Fehlern führen, z. B. zur Zuordnung des Schalls zu einem falschen Ort.
Diese Kameras eignen sich besonders gut für die Analyse geschlossener Räume wie Fahrzeuginnenräume oder Räume in Gebäuden. Sie verwenden oft eine sphärische Anordnung von Mikrofonen, wobei jedes Mikrofon nach außen gerichtet ist, um omnidirektionale Schallmessungen zu ermöglichen. Die Messungen werden typischerweise in 3D-Punktwolken oder auf einem 3D-CAD-Modell der Umgebung visualisiert, oft unter Verwendung von Beamforming-Techniken.
Anwendungsbereiche akustischer Kameras
Die Vielseitigkeit akustischer Kameras eröffnet ein breites Spektrum an Anwendungsmöglichkeiten in verschiedenen Branchen.
Industrielle Anwendungen und Wartung
Eine der häufigsten Anwendungen ist die Identifizierung und Lokalisierung von Lecks in Druckluft-, Gas-, Dampf- und Vakuumsystemen. Selbst kleine Lecks verursachen Ultraschallgeräusche, die für das menschliche Ohr nicht hörbar sind, aber von der akustischen Kamera erfasst und visualisiert werden können. Dies ermöglicht eine schnelle und effiziente Wartung, reduziert Energieverluste und verbessert die Sicherheit.
Ebenso wichtig ist die Erkennung von Teilentladungen (Partial Discharge) in Hochspannungsanlagen wie Isolatoren, Transformatoren oder Schaltanlagen. Teilentladungen sind ein frühes Anzeichen für potenzielle Isolationsprobleme, die zu schwerwiegenden Ausfällen führen können. Akustische Kameras, insbesondere solche mit Ultraschallfähigkeiten, können Teilentladungen aus sicherer Entfernung erkennen und lokalisieren, was eine proaktive Wartung ermöglicht.
Weitere industrielle Anwendungen umfassen die Geräuschanalyse in Produktionsanlagen, die Überwachung von Maschinen auf Anomalien oder sich entwickelnde Fehler (Predictive Maintenance) und die Lärmminderung am Arbeitsplatz.
Transportwesen
Akustische Kameras werden eingesetzt, um Geräuschquellen in Fahrzeugen zu analysieren, z. B. in Autokabinen, Flugzeugen oder Zügen. Dies hilft Ingenieuren, den Fahrkomfort zu verbessern und unerwünschte Geräusche zu identifizieren und zu reduzieren, die von Motor, Fahrwerk, Aerodynamik oder anderen Komponenten stammen.
Umweltüberwachung
Die Geräuschsignatur von Windkraftanlagen kann quantifiziert werden, um deren Umweltverträglichkeit zu bewerten und Optimierungspotenziale zu identifizieren. Auch die Überwachung von Umgebungslärm, z. B. entlang von Straßen oder in Wohngebieten, ist ein wichtiger Anwendungsbereich.
Verkehrslärmüberwachung (Lärmkameras)
Eine spezielle und zunehmend relevante Anwendung ist die Überwachung und Durchsetzung von Lärmvorschriften im Straßenverkehr. Sogenannte Lärmkameras verwenden akustische Kamerasysteme, oft kombiniert mit visuellen Kameras (ANPR für Kennzeichenerkennung) und KI, um Fahrzeuge zu identifizieren, die gesetzliche Lärmgrenzwerte überschreiten.
Diese Systeme müssen hochpräzise sein (oft Klasse 1 Genauigkeit nach IEC 61672-1), um als Beweismittel vor Gericht standzuhalten. Eine zentrale Herausforderung ist die genaue Identifizierung des lärmverursachenden Fahrzeugs, insbesondere wenn mehrere Fahrzeuge gleichzeitig im Bild sind. Passive akustische Ortung, die auf winzigen Zeitunterschieden basiert, hilft dabei, die genaue Position der Schallquelle zu bestimmen und diese dem entsprechenden Fahrzeug im Videobild zuzuordnen.
Obwohl die Technologie die Erkennung automatisiert, bleibt die Entscheidung zur Verhängung einer Strafe oft in menschlicher Hand. Dies berücksichtigt, dass laute Geräusche nicht immer unerwünschter Lärm sind (z. B. Hupen zur Gefahrenabwehr) und subjektive Faktoren eine Rolle spielen können. Die gesundheitlichen Auswirkungen von chronischem Lärm, wie Schlafstörungen und Herz-Kreislauf-Erkrankungen, unterstreichen die Bedeutung dieser Überwachung.
Spezifische Arten und Entwicklungen
Handgeführte Akustik-Imager (Point-and-Shoot)
Diese mobilen Geräte sind für schnelle Vor-Ort-Inspektionen konzipiert. Sie verfügen über ein Mikrofon-Array (z. B. 64 Mikrofone), eine integrierte visuelle Kamera und ein Display. Sie sind optimiert für Anwendungen wie die Lecksuche oder die Erkennung von Teilentladungen. Sie arbeiten oft im hörbaren und Ultraschallbereich (z. B. 2 kHz bis 100 kHz) und bieten Funktionen wie automatische Hintergrundgeräuschkompensation und wählbare Bandbreiten. Die visuelle Information wird mit der akustischen Überlagerung dargestellt, was die Lokalisierung extrem vereinfacht.
Wichtige Merkmale mobiler Kameras umfassen:
- Effektiver Frequenzbereich: Muss zur gesuchten Schallquelle passen (z. B. 20-30 kHz für Druckluftlecks, 10-30 kHz für Teilentladungen).
- Anzahl der Mikrofone: Eine höhere Anzahl verbessert das Signal-Rausch-Verhältnis und die Reichweite. Es gibt jedoch einen Punkt, an dem mehr Mikrofone mehr Rechenleistung erfordern oder die Auflösung verringern.
- Mikrofonplatzierung: Mikrofone müssen eng genug beieinander liegen, um ausreichende Daten für die Lokalisierung zu sammeln.
- Mikrofonleistung: Die Qualität und Leistung der einzelnen Mikrofone sind entscheidend.
- Intelligente Analytik: On-Camera-Analysen, automatische Uploads in die Cloud, einfache Berichterstellung und prädiktive Analysen (oft mit KI) sind wichtige Funktionen für die Effizienz.
Beispiele wie die Teledyne FLIR Si124 zeigen die Integration von 124 Mikrofonen, hoher Rechenleistung und cloudbasierter Analytik für spezifische Anwendungen wie Leckerkennung oder Teilentladung.
Schall-Scanner
Schall-Scanner wie das von Seven Bel entwickelte System sind speziell für Feldmessungen konzipiert. Sie simulieren eine große Anzahl von Mikrofonpositionen (z. B. bis zu 480) mit einer kleineren Anzahl von Mikrofonen (z. B. 5) auf einem rotierenden Ausleger. Dies ermöglicht eine präzise Visualisierung auch von Niederfrequenzschall, was für Bauakustik und Umweltlärmmessungen wichtig ist. Diese Systeme sind oft tragbar, batteriebetrieben und erfordern keinen externen Computer, was sie ideal für den Einsatz vor Ort macht.
Entwicklungen mit weniger Mikrofonen
Forschungsinitiativen untersuchen Möglichkeiten, hochgenaue Schallortung mit einer deutlich reduzierten Anzahl von Mikrofonen zu erreichen. Ansätze, die nur zwei Arrays mit je zwei Mikrofonen verwenden und TDOA in Winkel umwandeln, haben in Innenräumen bereits vielversprechende Ergebnisse gezeigt. Solche Entwicklungen könnten die Kosten für akustische Kameras weiter senken und ihre Verbreitung fördern.
Vergleich: 2D vs. 3D Akustikkameras
Die Wahl zwischen einer 2D- und einer 3D-Akustikkamera hängt stark vom Anwendungsfall ab. Hier eine kurze Gegenüberstellung:
| Merkmal | 2D Akustikkamera | 3D Akustikkamera |
|---|---|---|
| Mikrofonanordnung | Planar (Ring, Stern, Paddle etc.), Mikrofone in eine Richtung gerichtet | Sphärisch, Mikrofone omnidirektional gerichtet |
| Geeignet für | Ebene Oberflächen, Fernfeldmessungen, allgemeine Lärmkartierung | Geschlossene Räume, komplexe Oberflächen, Nahfeldmessungen |
| Umgang mit komplexen Oberflächen | Kann zu Fehlern führen, insbesondere bei der Intensitätsmessung | Berücksichtigt Oberflächengeometrie (basierend auf 3D-Modell), korrigiert Entfernungsfehler |
| Visualisierung | Überlagerung auf 2D-Bild oder Karte | Überlagerung auf 3D-Punktwolke oder CAD-Modell |
| Typische Anwendungen | Umweltlärm, Lärmkartierung auf großen Flächen, einige industrielle Anwendungen | Fahrzeuginnenräume, Raumakustik, komplexe industrielle Anlagen |
Häufig gestellte Fragen (FAQs)
Was genau macht eine akustische Kamera sichtbar?
Eine akustische Kamera macht die Intensität und Position von Geräuschquellen sichtbar. Sie erzeugt eine visuelle Karte, die über ein normales Bild oder Video der Umgebung gelegt wird. Lautere Geräusche erscheinen in der Karte intensiver (oft farblich hervorgehoben), und ihre Position wird genau angezeigt. Es ist quasi ein „Wärmebild“ für Schall.
Wie genau sind akustische Kameras?
Die Genauigkeit hängt von verschiedenen Faktoren ab: der Anzahl und Anordnung der Mikrofone, dem verwendeten Algorithmus (z. B. Beamforming, TDOA), der Entfernung zur Schallquelle, der Umgebung (Reflexionen, Hintergrundlärm) und der Art der Kamera (2D vs. 3D). Hochwertige Systeme können Schallquellen mit hoher Präzision lokalisieren.
Können akustische Kameras die Art des Geräusches erkennen?
Während die Grundfunktion die Lokalisierung ist, können fortschrittliche Systeme, oft unter Einsatz von KI, bestimmte Geräuschmuster erkennen und klassifizieren, z. B. das Geräusch eines Lecks, einer Teilentladung, eines bestimmten Motortyps oder sogar Musik. Dies ermöglicht eine gezieltere Analyse und Anwendung.
Sind Lärmkameras zur Verkehrsüberwachung in Deutschland im Einsatz?
Die Nutzung von Lärmkameras zur automatisierten Verhängung von Bußgeldern für zu laute Fahrzeuge wird in verschiedenen Ländern, darunter auch in Deutschland, diskutiert und in Pilotprojekten getestet. Die rechtlichen Rahmenbedingungen und die Frage der Beweissicherheit sind dabei wichtige Aspekte. Eine breite flächendeckende Einführung steht noch aus.
Wofür werden mobile (handgeführte) akustische Kameras am häufigsten verwendet?
Mobile akustische Kameras sind besonders nützlich für schnelle Inspektionen und Fehlersuche vor Ort. Ihre Hauptanwendungsbereiche sind die Lokalisierung von Lecks in Druckluft-, Gas- oder Vakuumsystemen sowie die Erkennung und Lokalisierung von Teilentladungen in elektrischen Anlagen. Sie sind einfach zu bedienen und liefern sofortige Ergebnisse.
Fazit
Akustische Kameras sind eine etablierte und sich ständig weiterentwickelnde Technologie, die das Potenzial hat, die Art und Weise, wie wir Geräusche wahrnehmen und analysieren, grundlegend zu verändern. Ob 2D- oder 3D-Systeme, basierend auf Algorithmen wie Strahlformung oder akustische Holographie, sie bieten wertvolle Einblicke in akustische Umgebungen.
Die Integration von Künstlicher Intelligenz und die Entwicklung von Techniken, die mit weniger Mikrofonen auskommen, machen diese Technologie leistungsfähiger und zugänglicher. Von der industriellen Effizienzsteigerung durch die Erkennung von Lecks und Fehlern bis hin zur Verbesserung der Lebensqualität durch die Überwachung und Reduzierung von Verkehrslärm – akustische Kameras sind ein mächtiges Werkzeug im Kampf gegen unerwünschten Schall und zur Optimierung akustischer Umgebungen.
Mit spezifischen Anwendungen wie den handgeführten Imager für die schnelle Lecksuche oder den Lärmkameras für die Verkehrsüberwachung wird die Technologie immer zielgerichteter und löst konkrete Probleme in verschiedenen Bereichen. Die Fähigkeit, Schall sichtbar zu machen, eröffnet neue Möglichkeiten für Analyse, Wartung und Überwachung.
Hat dich der Artikel Akustische Kameras: Geräusche sichtbar machen interessiert? Schau auch in die Kategorie Ogólny rein – dort findest du mehr ähnliche Inhalte!